ECE391 Course Notes
0 intro
fuck you ans kiss my ass.
9 Programmable interrupt controller (PIC)
Motivation
Connect (more then 1) devices to processor’s interrupt input.
Why not use a OR gate?
no way to tell which device
{: .prompt-tip }
Overview
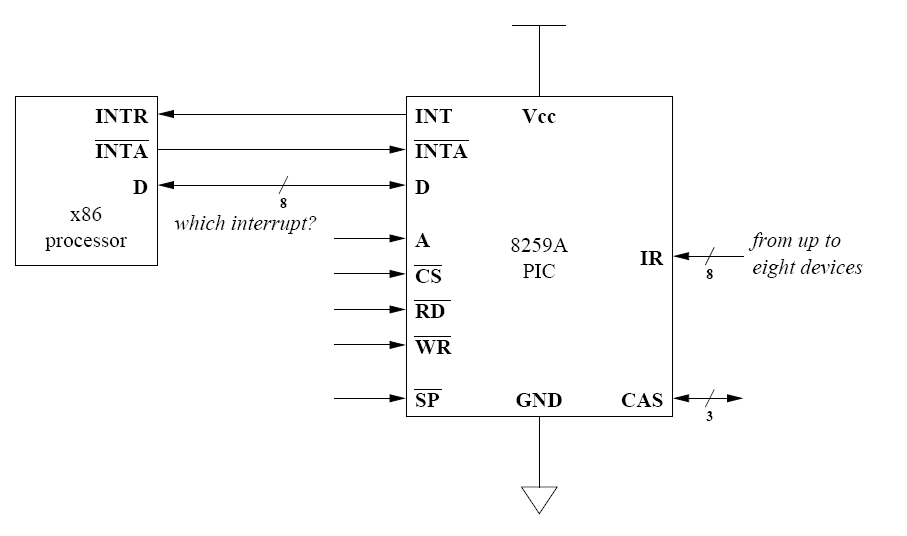
A= address match for portsCS’= chip select (does processor want PIC to read/write?)RD’andWR’defined from processor’s point of viewRD’= processor will read data (vector #) from PICWR’= processor will write data (command, EOI) to PIC
Ports: 0x20 & 0x21
0x20: command port0x21: data port
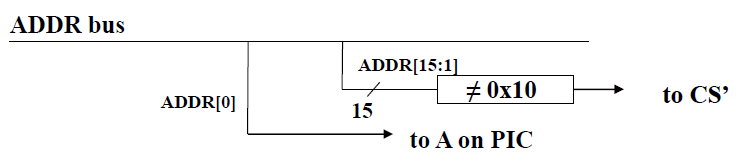
i.e. CS' only enabled when ADDR is 0x20 or 0x21.
prioritization on 8259A: 0 is high, 7 is low
Steps
When a device raises an interrupt…
- check if priority is higher than those of in service interrupts
- if not, do nothing
- if so
- report the highest priority raised to the processor
- mark that device as being in service
When processor reports EOI (end of interrupt) for
some interrupt…
- remove the interrupt from the in service mask
- check for raised interrupt lines that should be reported to processor
How to report a interrupt?
- PIC raises
INTR - processor strobes
INTA’(active low) repeatedly- creates cycles for PIC to write vector to data bus
- (must follow spec timing! PIC is not infinitely fast.)
- processor sends
EOIwith specific combinations of A & D inputs (A is from address bus, D is from data bus)
Cascading
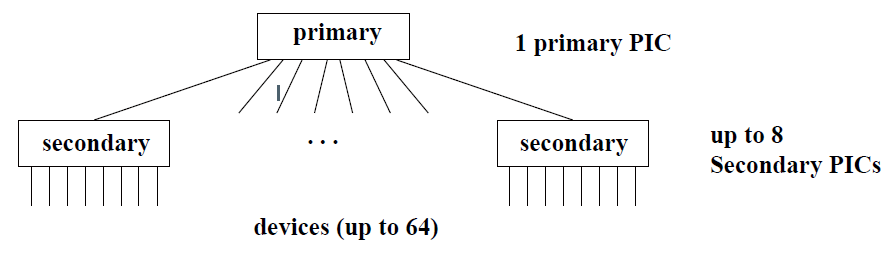
Up to 8x8=64 devices with cascading.
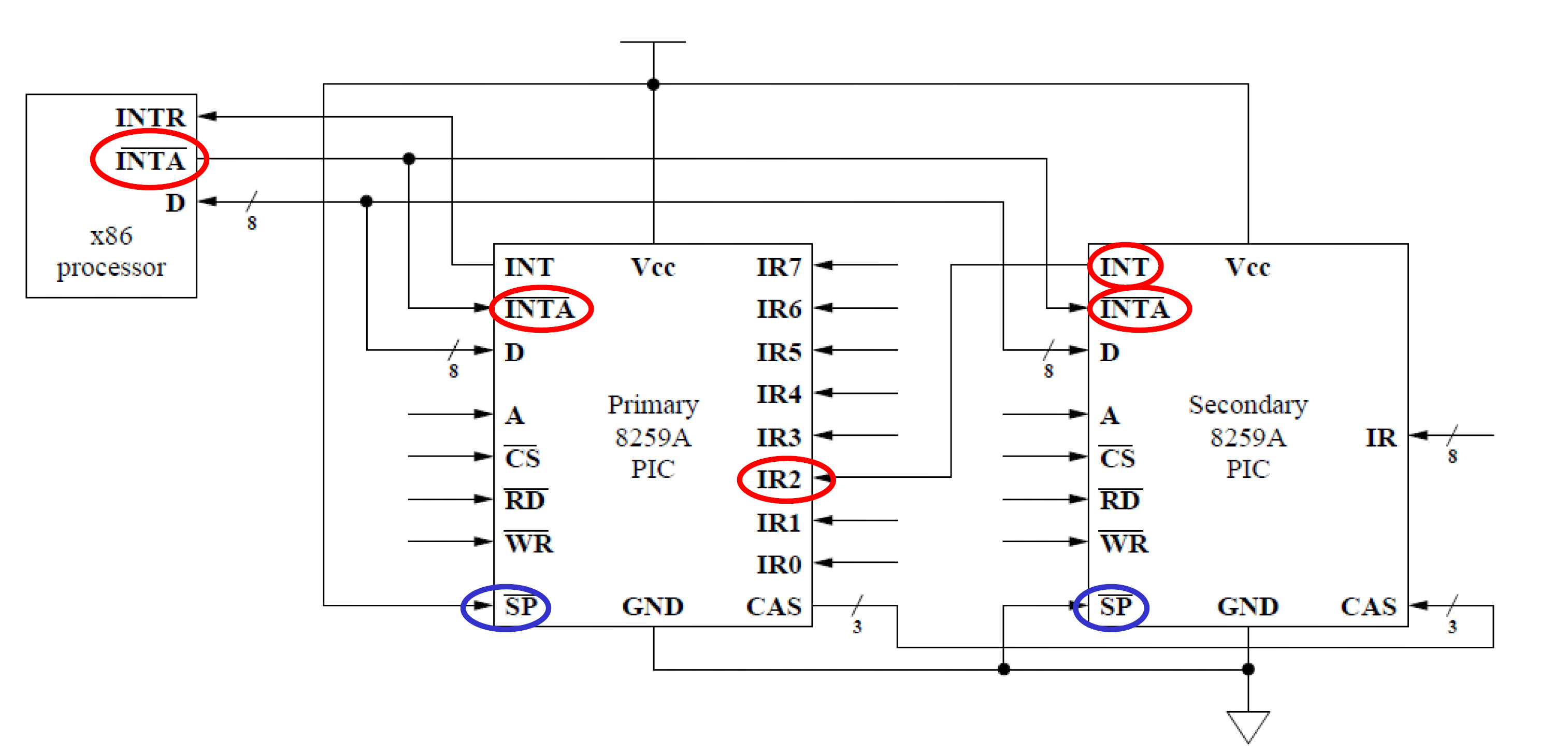
Architecture
secondary 8259A: ports 0xA0 & 0xA1
secondary PIC & primary PIC:
- share
DandINTA' - secondary PIC connects to
IR2on primary PIC. SP': low -> secondary PIC; 1 -> primary PIC.CAS3bit, indicate which secondary PIC (8 PIC’s max) to respond on data bus.
 {:. w-50}
{:. w-50}
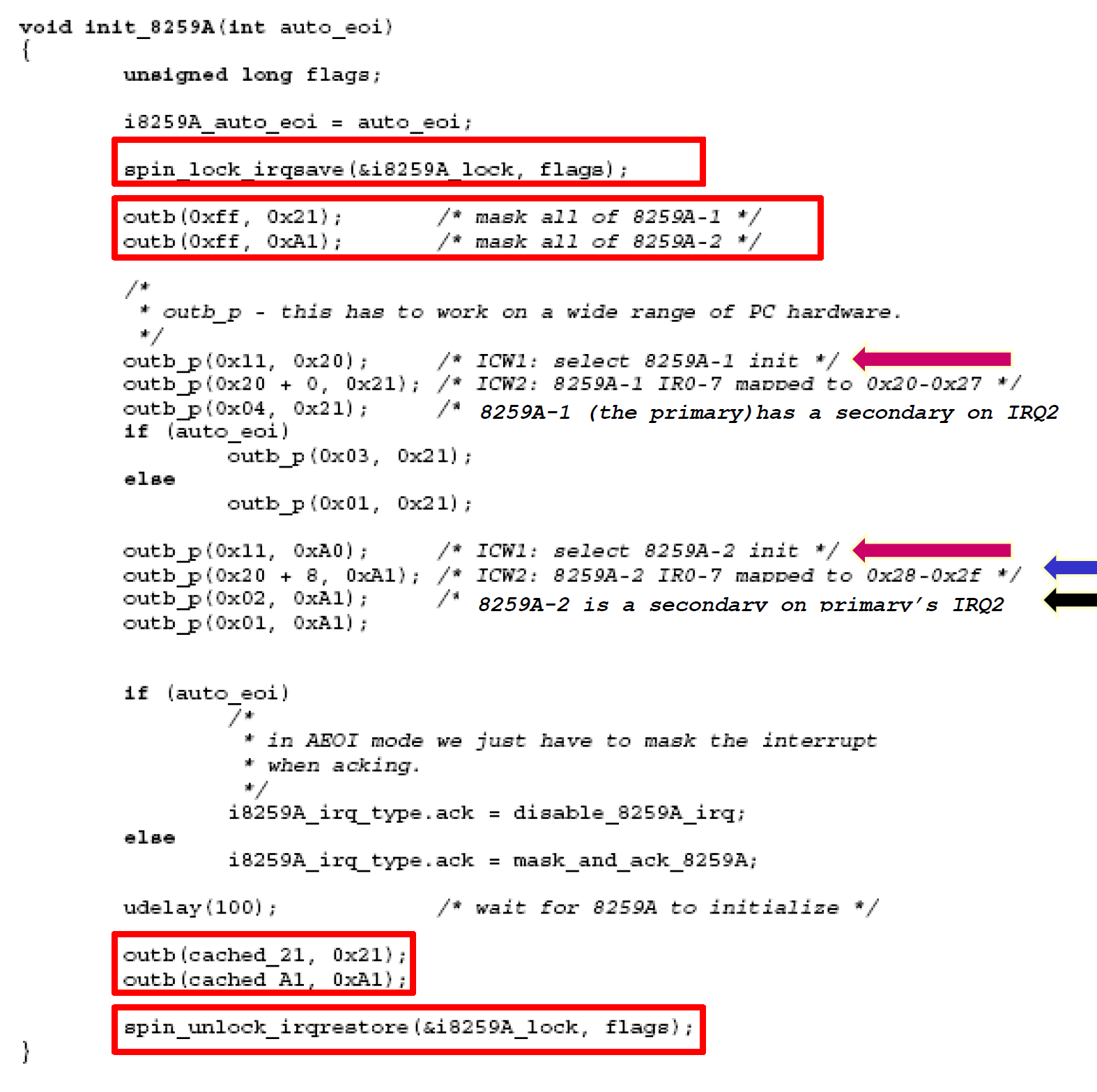
- What is the auto_eoi parameter? always = 0
- Four initialization control words to set up primary 8259A
- Four initialization control words to set up secondary 8259A
| ICW | port(A=?) | info contained in Initialization Control Word |
|---|---|---|
| ICW1 | 0 | start init, edge triggered inputs, cascade mode, 4 ICWs |
| ICW2 | 1 | high bits of vector # |
| ICW3 | 1 | primary PIC: bit vector of secondary PIC secondary PIC: input pin on primary PIC |
| ICW4 | 1 | ISA=x86, normal/auto EOI |
Other details

10 Linux abstraction of PIC
Linux use a jump table (NOT IDT) hw_irq_controller for each vector number.
The table is used to interact with appropriate PIC.
hw_irq_controller |
function | Comment |
|---|---|---|
| human readable name | const char* name; |
e.g. “XTPIC” PIC”; see /proc/interrupts{: .filepath} |
| startup function | unsigned int (*startup)(unsigned int irq); |
called when first handler is installed for an interrupt; change the corresponding mask bit in 8259A |
| shutdown function | void (*shutdown)(unsigned int irq); |
called after last handler is removed for an interrupt; change the corresponding mask bit in 8259A |
| enable function | void (*enable)... |
|
| disable function | void (*disable)... |
|
| mask function | ||
| mask_ack function | ||
| unmask function | ||
| (+ several others…) |
Also
void (*ack) ..., called at start of interrupt handling to ack receipt of the interrupt (sends EOI to PIC).void (*end)..., called at end of interrupt handling (on 8259, enables interrupt (unmasks it) on PIC).
*Initially, all 8259A interrupts are masked out using mask on 8259A (then use startup / shutdown function…).
General interrupt abstractions
Interrupt Chaining
Motivation
Problems:
- may have > 15 devices.
- 1 deivce may be reponded by >1 hendler.
One approach
Form a linked list for handlers.
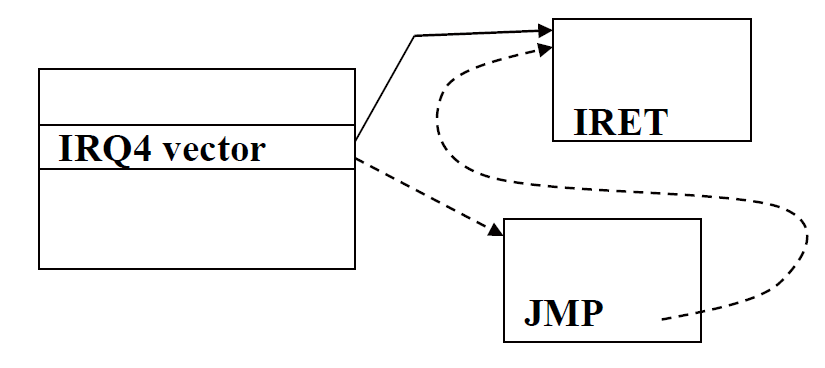
bad:
- no way to remove self unless you’re first in list
Solution
interrupt chaining with linked list data structure.
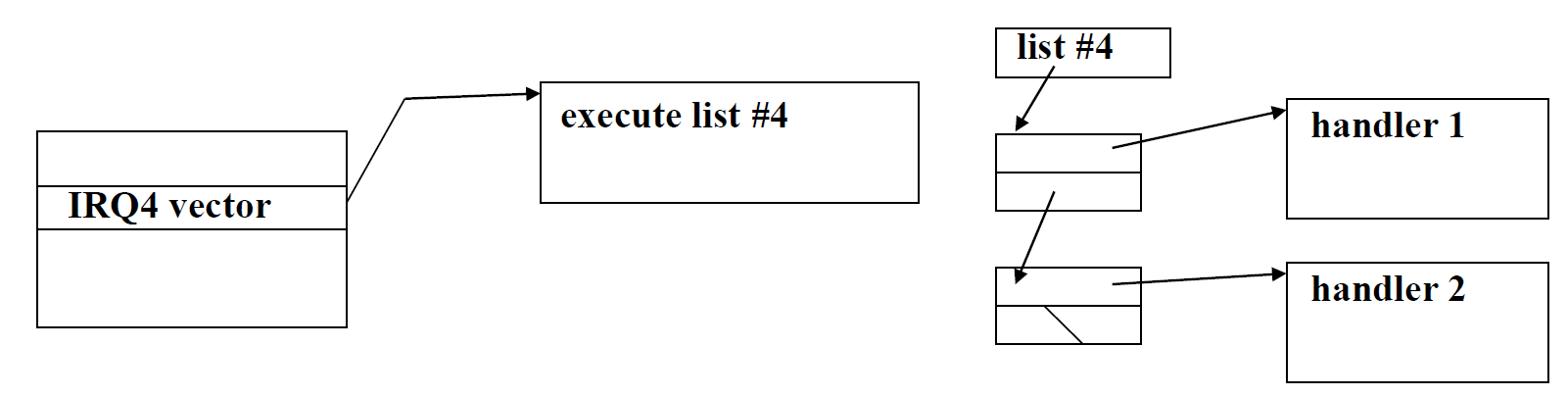
Drawbacks of chaining
- for > 1 device: must query devices to see if they raised interrupt
- for 1 device: must avoid stealing data/confusing device
Soft Interrupts
software generated (soft) interrupt. runs at priority between program and hard interrupts, has no access to INTR pin!
Usually generated by hard interrupt handlers to do work not involving device
hardware interrupt (1st stage) need to be fast
tasklet (2nd stage) can be triggered by hardware interrupt handlers and do tasks that not involving the device.
Linux version is called tasklets.
example: network encryption/decryption, decrypter want to interrupt program.
irq_desc / irqaction Structures
Code
irq_desc
/**
* struct irq_desc - interrupt descriptor
* @irq_data: per irq and chip data passed down to chip functions
* @timer_rand_state: pointer to timer rand state struct
* @kstat_irqs: irq stats per cpu
* @handle_irq: highlevel irq-events handler [if NULL, __do_IRQ()]
* @action: the irq action chain
* @status: status information
* @core_internal_state__do_not_mess_with_it: core internal status information
* @depth: disable-depth, for nested irq_disable() calls
* @wake_depth: enable depth, for multiple set_irq_wake() callers
* @irq_count: stats field to detect stalled irqs
* @last_unhandled: aging timer for unhandled count
* @irqs_unhandled: stats field for spurious unhandled interrupts
* @lock: locking for SMP
* @affinity_notify: context for notification of affinity changes
* @pending_mask: pending rebalanced interrupts
* @threads_oneshot: bitfield to handle shared oneshot threads
* @threads_active: number of irqaction threads currently running
* @wait_for_threads: wait queue for sync_irq to wait for threaded handlers
* @dir: /proc/irq/ procfs entry
* @name: flow handler name for /proc/interrupts output
*/
struct irq_desc {
struct irq_data irq_data;
struct timer_rand_state *timer_rand_state;
unsigned int __percpu *kstat_irqs;
irq_flow_handler_t handle_irq;
#ifdef CONFIG_IRQ_PREFLOW_FASTEOI
irq_preflow_handler_t preflow_handler;
#endif
struct irqaction *action; /* IRQ action list */
unsigned int status_use_accessors;
unsigned int core_internal_state__do_not_mess_with_it;
unsigned int depth; /* nested irq disables */
unsigned int wake_depth; /* nested wake enables */
unsigned int irq_count; /* For detecting broken IRQs */
unsigned long last_unhandled; /* Aging timer for unhandled count */
unsigned int irqs_unhandled;
raw_spinlock_t lock;
#ifdef CONFIG_SMP
const struct cpumask *affinity_hint;
struct irq_affinity_notify *affinity_notify;
#ifdef CONFIG_GENERIC_PENDING_IRQ
cpumask_var_t pending_mask;
#endif
#endif
unsigned long threads_oneshot;
atomic_t threads_active;
wait_queue_head_t wait_for_threads;
#ifdef CONFIG_PROC_FS
struct proc_dir_entry *dir;
#endif
const char *name;
} ____cacheline_internodealigned_in_smp;irqaction
/**
* struct irqaction - per interrupt action descriptor
* @handler: interrupt handler function
* @flags: flags (see IRQF_* above)
* @name: name of the device
* @dev_id: cookie to identify the device
* @next: pointer to the next irqaction for shared interrupts
* @irq: interrupt number
* @dir: pointer to the proc/irq/NN/name entry
* @thread_fn: interrupt handler function for threaded interrupts
* @thread: thread pointer for threaded interrupts
* @thread_flags: flags related to @thread
* @thread_mask: bitmask for keeping track of @thread activity
*/
struct irqaction {
irq_handler_t handler;
unsigned long flags;
void *dev_id;
struct irqaction *next;
int irq;
irq_handler_t thread_fn;
struct task_struct *thread;
unsigned long thread_flags;
unsigned long thread_mask;
const char *name;
struct proc_dir_entry *dir;
} ____cacheline_internodealigned_in_smp;request_irq function
Code
extern int __must_check
request_irq(unsigned int irq, irq_handler_t handler, unsigned long flags,
const char *name, void *dev);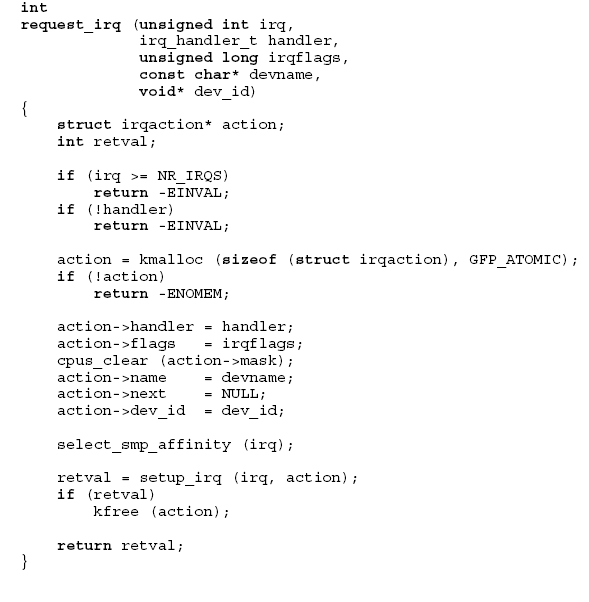
Comments
irq- irq # (0-15 for PIC)handler- pointer to interrupt handler with following arguments- irq #
- dev_id pointer (type void*)
- handlers should return 1 if handled, 0 if not
irqflags- bit vectorIRQF_SHARED- interrupt chaining is allowedIRQF_DISABLED- execute handlers with IF=0IRQF_SAMPLE_RANDOM- use device timing as source of random numbers
devname- human-readable device name (visible in /proc/interrupts)dev_id- pointer to device-specific data (returned to handler when called)
- Start by checking values
(two checks from the shown code) - Dynamically allocate new action structure for linked list of actions
- Fill in the new action structure
- Try to add it
- using
setup_irq - if call fails, free the action structure
- using
Comments GPT
In Linux, request_irq is a kernel function that is called when a driver wants to register an interrupt handler with the kernel. It is typically called during the initialization phase of a device driver, after the device has been set up and is ready to handle int errupts.
Here is what request_irq does:
-
Registration: It registers a new interrupt handler for the specified interrupt line with the kernel. The interrupt line is usually associated with a hardware device that generates interrupts.
-
Handler Function: The function expects the interrupt number, a pointer to the interrupt handler function that should be called when the interrupt occurs, interrupt flags that control the behavior of the interrupt, a name for the interrupt (for identification in
/proc/interrupts), and a device ID that is passed to the interrupt handler (usually a pointer to the device-specific structure). -
Flags: The flags can include various options such as:
IRQF_SHARED: Allows the interrupt line to be shared among multiple drivers.IRQF_DISABLED: This flag is now deprecated but was used to keep the interrupt line disabled while the handler is running.IRQF_TRIGGER_*: Specifies trigger conditions for the interrupt, such as rising edge or level high.
-
Error Handling: If the request is successful,
request_irqreturns zero. If it fails, it will return a negative error code indicating the reason for failure. -
Resource Management: By calling
request_irq, the driver claims the interrupt line, and it’s the driver’s responsibility to release the interrupt line by callingfree_irqwhen the device is removed or the driver is unloaded. This ensures that the interrupt line is properly freed for other devices to use. -
Concurrency Control: Registering an interrupt handler also involves specifying how to handle concurrency (such as with spinlocks) if the interrupt handler can be re-entered or if it can run simultaneously on different processors in a multiprocessing environment.
In summary, request_irq is a critical function for interrupt handling in device drivers, allowing the setup of a handler that responds to hardware interrupts, which is essential for reactive and real-time device communication within the kernel.
setup_irq function
Code
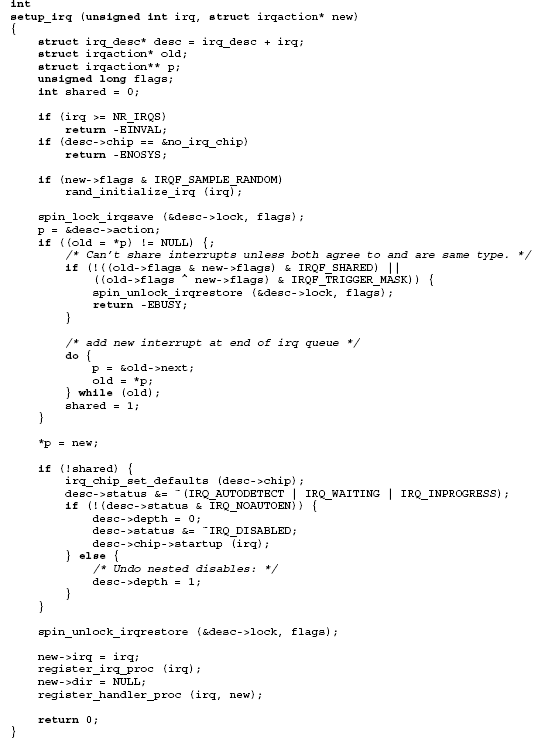
Note:
irq_chip_set_defaults(desc->chip);
Comments
- Start with a couple of sanity checks
- If random sampling flag is set
- initialize as source of random numbers
- good random numbers are hard to find!
- devices such as disks can be used because of “random”
rotational latency to read data (for example)
- Critical section (most of function)
- blocks other activity on descriptor
- uses irqsave/restore to allow handlers to be added from any context
- Note that new action goes at the end of the linked list, not the start
- Interrupt chaining only allowed
- if all handlers agree to it
- otherwise only first handler is successfully added
- If this handler is the first
- make sure that PIC jump table has proper default functions
- clear some status flags
- clear any previous software disablement (depth)
- call the PIC startup function
- After critical section
- create
/proc/irq/<irq#>directory if necessary - add handler subdirectory in
/proc/irq/<irq#>/<action name>
- create
free_irq function
Code
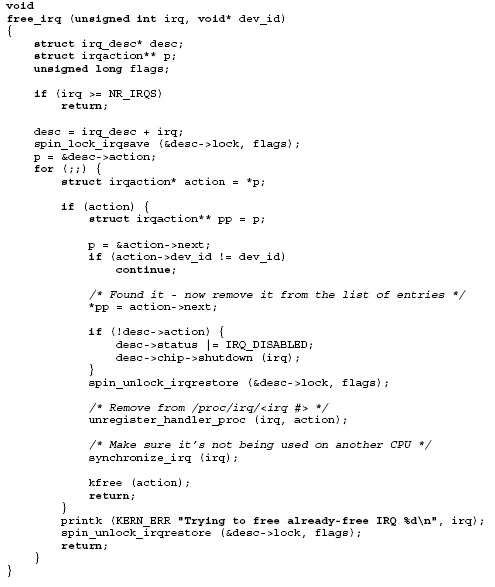
Comments
-
Arguments
- irq - irq # (0-15 for PIC)
- dev_id - MUST match pointer value used in request_irq call
-
Start by checking arguments
-
Critical section starts to prevent manipulations of descriptor
- blocks interrupt from starting to execute
- (interrupt may already be executing on another processor)
-
Search for action in list
- based on dev_id pointer
- hence need for matching pointer
- passing NULL dev_id not allowed with chained interrupts
-
Once found (notice that most of the loop executes exactly once)
- remove the action
- if this action/handler was the last for this interrupt,
- turn on software disablement
- (doing so signals interrupts waiting for descriptor lock to abort once they obtain the lock)
- call the PIC shutdown function
-
Remove the
/proc/irq/<irq #>/<action name>entry -
On an SMP
- interrupt may be executing on another processor
- need to wait for it to finish after releasing descriptor lock
-
Finally, free the action structure
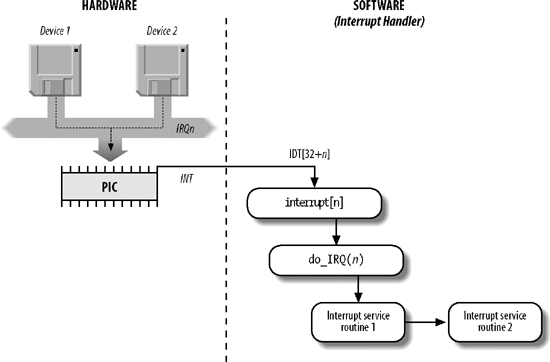
Interrupt Invocation
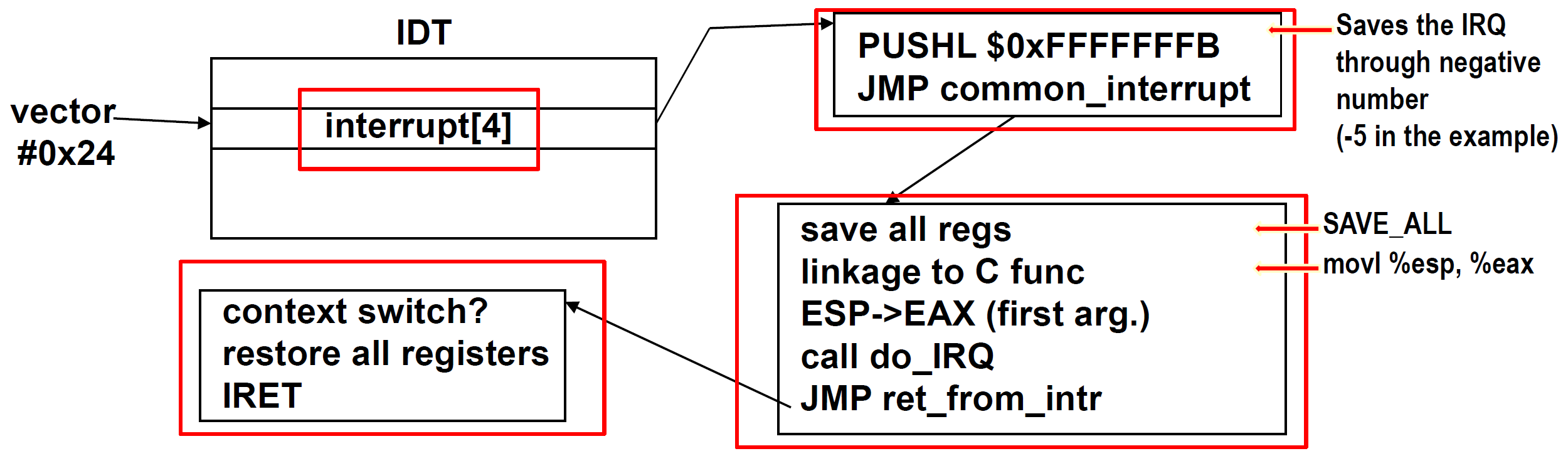
flowchart LR
IDT -->|"interrupt[4]->offset_lowerbits"| ISR["ISR:\nPUSHL\nJUMP"]
ISR --> ...see irq_desc Array
ISR : Interrupt Service Routine
- Why funnel all IRQs into one piece of code(instead of producing one function per IRQ) ?
- Kernel code/size versus speed tradeoff
{: .prompt-tip }
Stack View

NOTE: registers pushed before the IRQ# are done by processor in
INT, and is used together withIRET.
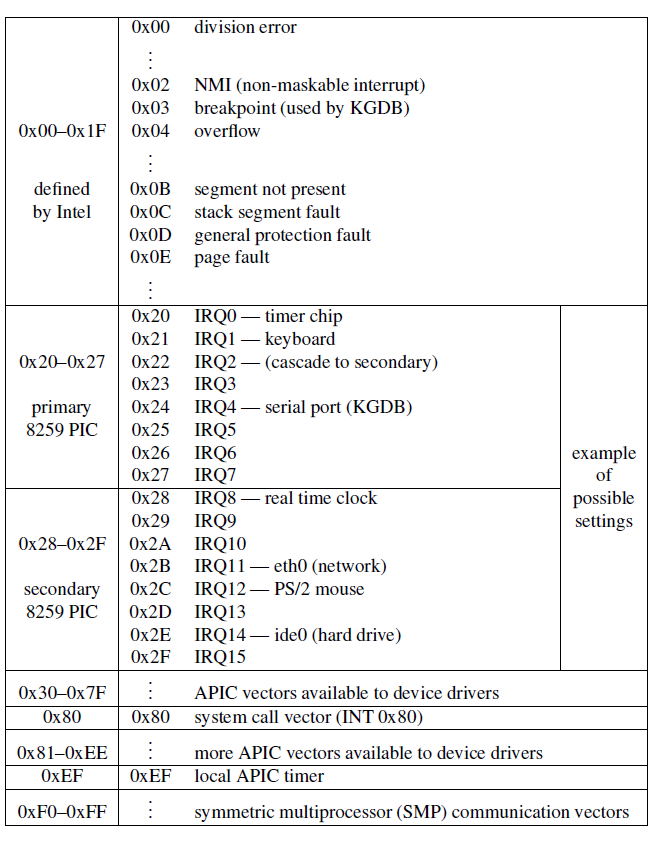
IDT
struct idt_entry {
unsigned short int offset_lowerbits; // ISR的低16位偏移量
unsigned short int selector; // GDT段选择子
unsigned char zero; // 置零字段
unsigned char type_attr; // 类型和属性
unsigned short int offset_higherbits; // ISR的高16位偏移量
} __attribute__((packed));- Associates the interrupt line with the int. handler routine.
- 256 entries (descriptors) (each 8 bytes)
- hardware interrupt: vectors 0x20 to 0x2F
- interrupt gates <-> descriptor
- IF=0 when interrupt gate is invoked
- use
lidtinstruction to load - init IDT in
setup_idt()
12 Linux interrupt system
irq_desc Array
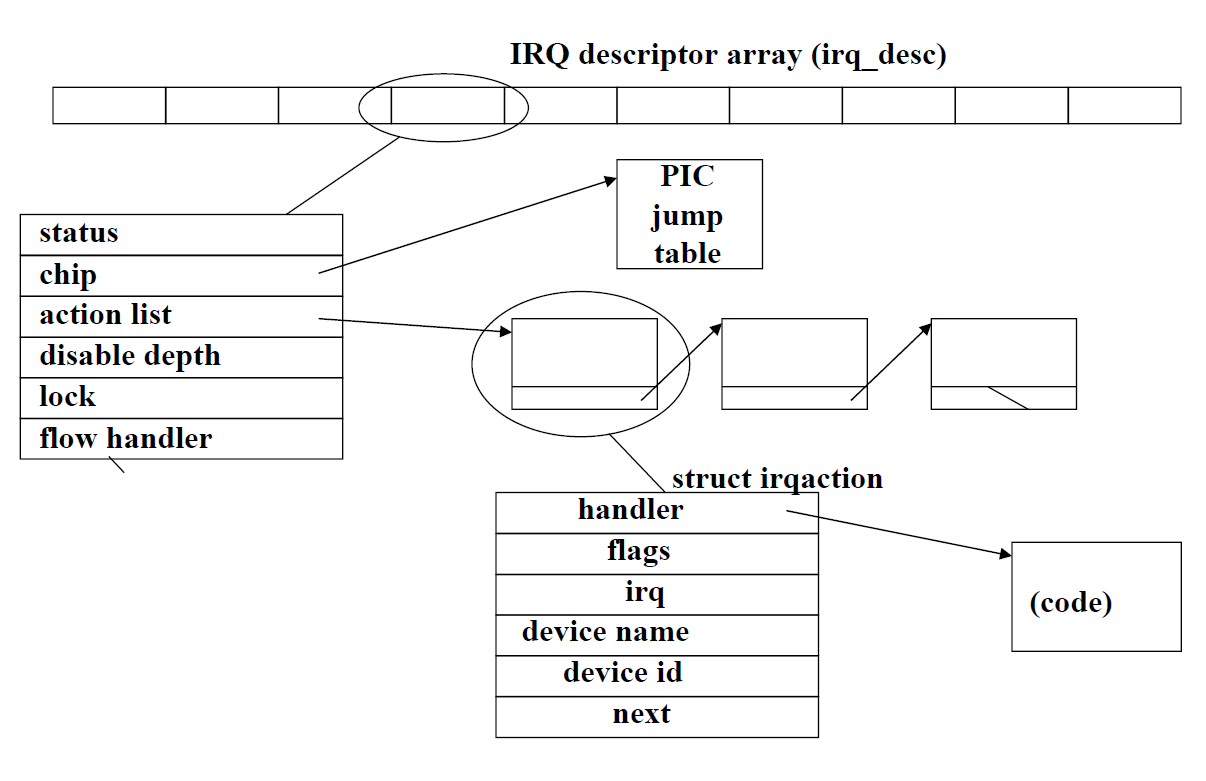
- Every interrupt vector has its own
irq_desc_tdescriptor - Descriptors are grouped together in
irq_descarray, a data structure supported by Linux - When a device driver calls the
request_irq()function a new structure to represent the handler is allocated and initialized
FYI
IRQ descriptor array (irq_desc): 这是一个数组,每个条目对应一个中断号(IRQ)。它是内核用来快速索引每个中断服务例程的中心数据结构。
PIC jump table: 这通常指的是可编程中断控制器(Programmable Interrupt Controller)的跳转表,它决定了硬件中断信号如何映射到CPU中断线。
struct irqaction: 这是一个结构体,描述了中断的处理程序(handler),以及处理程序的属性(如flags),相关的IRQ号,设备名,设备ID,以及其他可能的irqaction结构体形成的链表(next指针)。
handler: 这个部分指向处理该中断的具体函数。
code: 这表示实际执行的中断处理代码。
linked list: 如果有多个处理程序与同一个IRQ号关联,它们会通过一个链表连接起来。
status, chip, action list, disable depth, lock, flow handler: 这些字段是irq_desc结构体的一部分,包含了中断的状态、关联的硬件芯片信息、行为列表、禁用深度(中断可以被禁用多次,每次调用disable都会增加这个计数)、锁定机制和流控制处理函数。
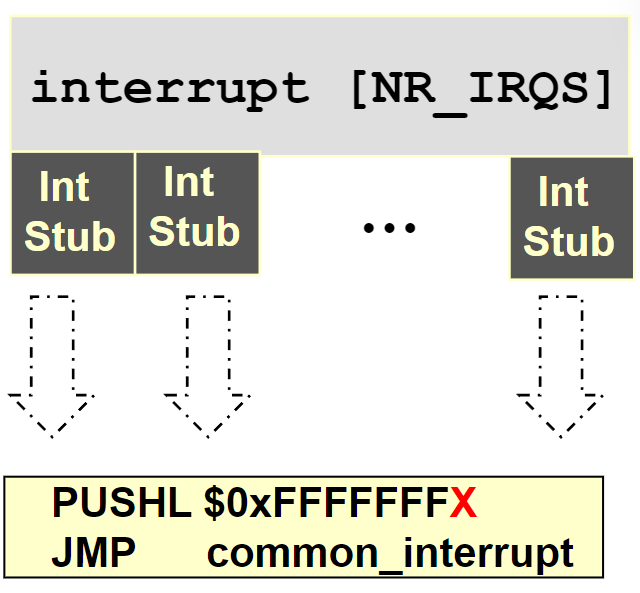
Kernel maintains one global array of function pointers (interrupt[NR_IRQS]) in which it stores pointers to interrupt stubs (NR_IRQS is 16 if we use the PIC).
Initialization of Interrupt Gates
During initialization init_IRQ () sets the status field of each
IRQ descriptor to IRQ_DISABLED.
Then init_IRQ () do:
for (i = 0; i < NR_IRQS; i++)
if (i+32 != 128)
set_intr_gate(i+32, interrupt[i]);13 Soft Interrupts in Linux
- When are soft interrupts executed?
- after a hard interrupt completes
- periodically by a daemon in the kernel
- How?
- seven or eight prioritized types, including high and low tasklet
priorities - linked list for each tasklet priority
- run on processor on which interrupt is scheduled
- each handler atomic with respect to itself (only)
- seven or eight prioritized types, including high and low tasklet
Declaring a handler
DECLARE_TASKLET (name, func , data);name: name oftasklet_structto be declareddata: anunsigned longfunc:void (*func) (unsigned long);
the tasklet_struct structure:
struct tasklet_struct {
struct tasklet_struct *next; // next tasklet
unsigned long state; // status of tasklet: TASKLET_STATE_SCHED, TASKLET_STATE_RUN
atomic_t count; // # of disables
void (*func)(unsigned long); // pointer to the tasklet function
unsigned long data; // integer which can be used by the tasklet function
};The following two calls schedule a tasklet for execution:
// schedules tasklet at low priority on the executing processor
void tasklet_schedule (struct tasklet_struct* t);
// schedules at high priority
void tasklet_hi_schedule (struct tasklet_struct* t);Tasklet Execution
The do_softirq call call
- checks per-processor bit vector of pending priorities (high, low, etc.)
- executes action for each priority (
softirq_vec) tasklet_actionwalks through linked list
tasklet_hi_actionwalks through high-priority list- repeats up to 10 times or until no softirqs are raised
Atomicity
Two bits in state changed atomically
TASKLET_STATE_SCHEDtasklet scheduled for executionTASKLET_STATE_RUNtasklet executing on some processor
When scheduling
- set
TASKLET_STATE_SCHEDatomically
if already set, schedule call does nothing
Execution Graph

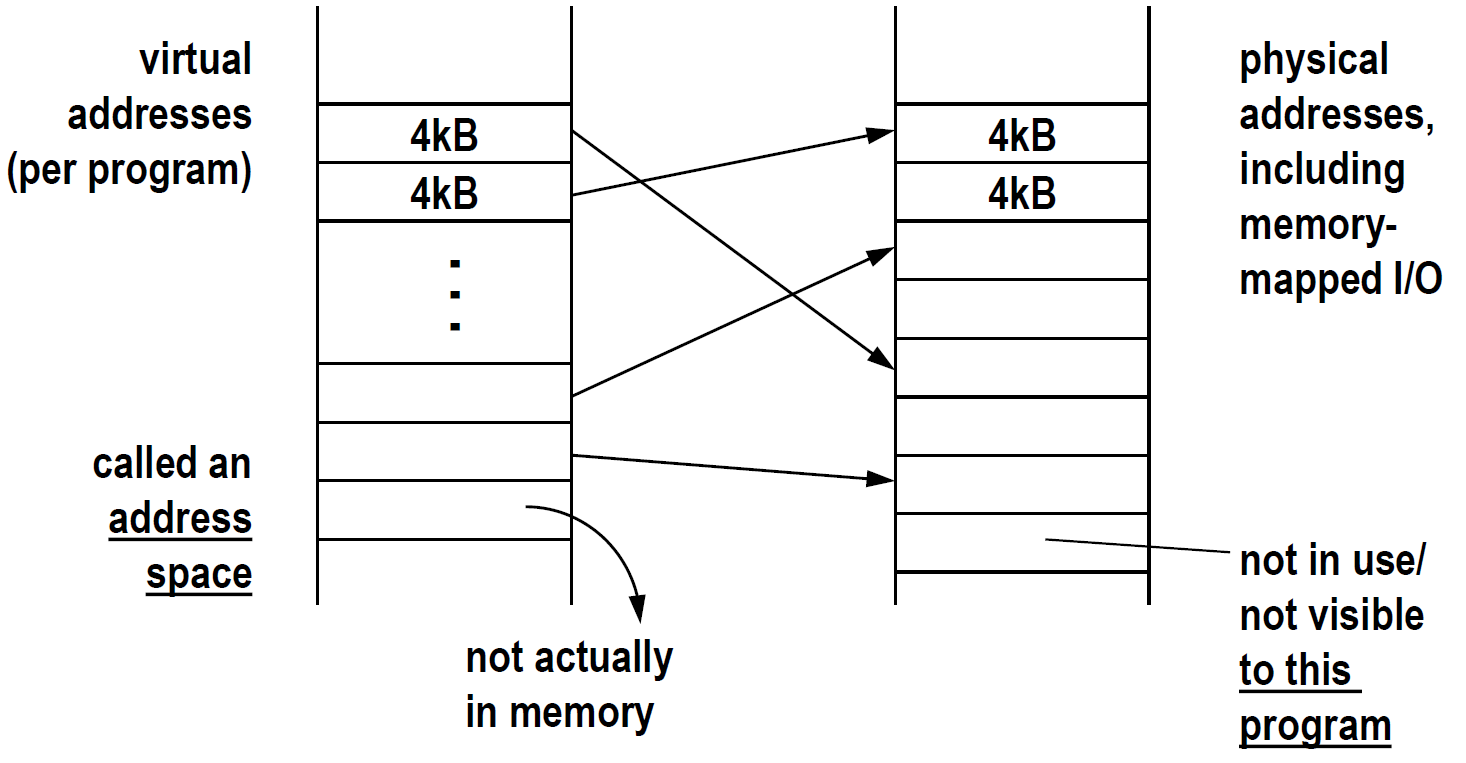
14 Virtual Memory
What is virtual memory?
- indirection between memory addresses seen by software and those
used by hardware - typically done with large blocks, e.g., 4kB or 4MB in x86
Why use virtual memory? (in decreasing order of importance)
-
protection
- one program cannot accidentally or deliberately destroy another’s data
- the memory is simply not accessible
-
more effective sharing
- two (or more) programs that share library code can share a single copy
of the code in physical memory - code and data not actively used by a program
- can be pushed out to disk to make room for other programs’ active data
- provides the illusion of a much larger physical memory
- two (or more) programs that share library code can share a single copy
-
no fragmentation
-
simplifies program loading and execution: no relocation of code
x86 Protection Model
| level | meaning |
|---|---|
| CPL | current privilege level (of executing code) |
| RPL | requestor’s privilege level; when code at high privilege level executes on behalf of code at lower level, some accesses may voluntarily lower privilege to that of caller/beneficiary |
| DPL | descriptor privilege level; level necessary to execute code/data |
if MAX(CPL,RPL) > DPL (privilege too low), processor generates an exception (general protection fault)
Segmentation
flowchart LR
A[logical address]
B[linear address]
C[physical address]
A -->|segmentation unit| B
B -->|paging unit| CTwo levels of indirection. Segmentation is unused.
x86 in protected mode always uses segmentation.
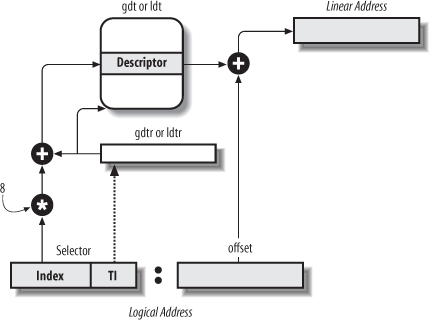
Segment Selectors
A logical address consists of two parts:
- (16-bits) A segment selector

entries max. - (32-bits) An offset that specifies the relative address within the segment.
Segmentation Registers store Segment Selectors
| register | segment |
|---|---|
| CS | code segment register (includes a 2-bit field that specifies the Current Privilege Level (CPL) of the CPU) |
| DS | data segment register |
| SS | stack segment register |
| ES | extra data segment register |
| FS | extra data segment register |
| GS | extra data segment register |
Each segment register has 16 bits visible + ~64 bits shadow (not accessible via ISA) that cache the description of the segment # referenced by the visible 16 bits.
{: .prompt-tip }
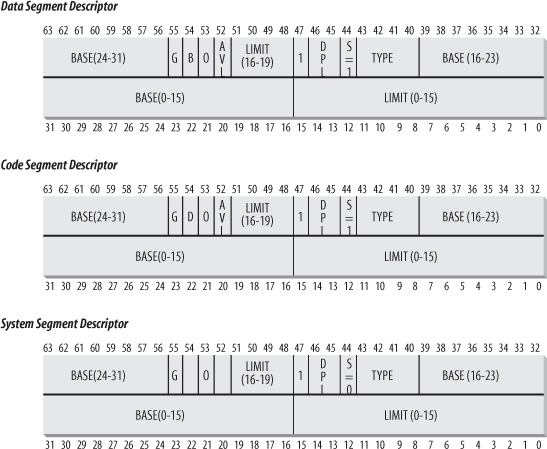
Segment Descriptors
Each segment is represented by an 8-byte Segment Descriptor that describes the segment characteristics.
- Code Segment Descriptor
- Data Segment Descriptor
- Task State Segment Descriptor (TSSD)
Different Types
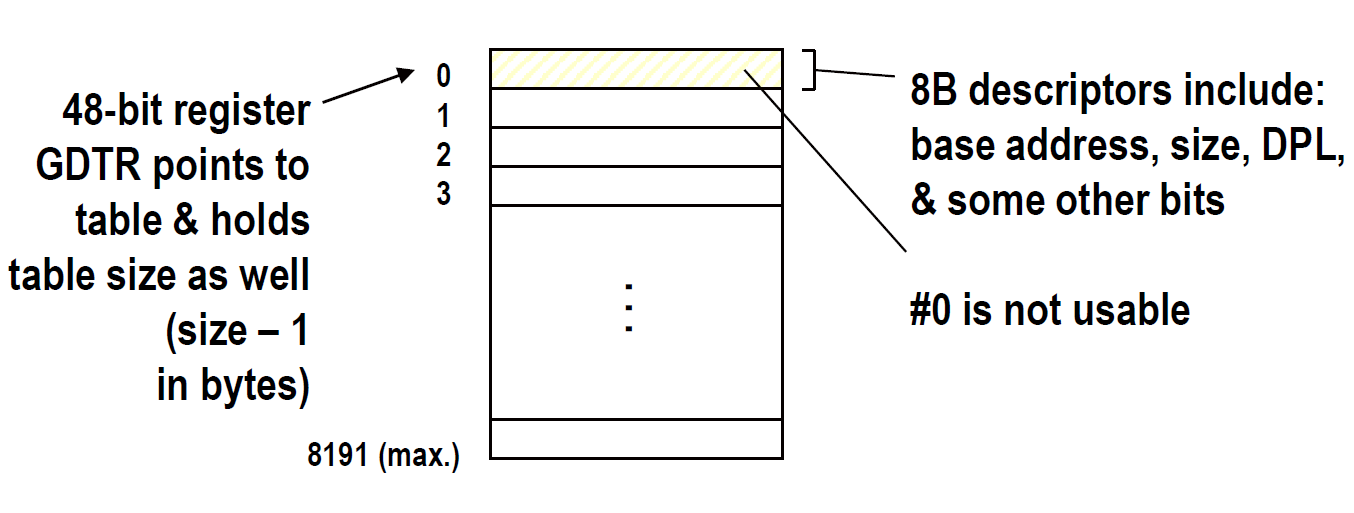
Global descriptor table (GDT)
Segment Descriptor fields
| Field name | Description |
|---|---|
| Base | Contains the linear address of the first byte of the segment. |
| G | Granularity flag: if it is cleared (equal to 0), the segment size is expressed in bytes; otherwise, it is expressed in multiples of 4096 bytes. |
| Limit | Holds the offset of the last memory cell in the segment, thus binding the segment length. When G is set to 0, the size of a segment may vary between 1 byte and 1 MB; otherwise, it may vary between 4 KB and 4 GB. |
| S | System flag: if it is cleared, the segment is a system segment that stores critical data structures such as the Local Descriptor Table; otherwise, it is a normal code or data segment. |
| Type | Characterizes the segment type and its access rights (see the text that follows this table). |
| DPL | Descriptor Privilege Level: used to restrict accesses to the segment. It represents the minimal CPU privilege level requested for accessing the segment. Therefore, a segment with its DPL set to 0 is accessible only when the CPL is 0 — that is, in Kernel Mode — while a segment with its DPL set to 3 is accessible with every CPL value. |
| P | Segment-Present flag : is equal to 0 if the segment is not stored currently in main memory. Linux always sets this flag (bit 47) to 1, because it never swaps out whole segments to disk. |
| D or B | Called D or B depending on whether the segment contains code or data. Its meaning is slightly different in the two cases, but it is basically set (equal to 1) if the addresses used as segment offsets are 32 bits long, and it is cleared if they are 16 bits long (see the Intel manual for further details). |
| AVL | May be used by the operating system, but it is ignored by Linux. |
gdtr register: 48 bits in total
- 32-bits: base address of GDT
- 16 bits: limit (in Byte) (max = Bytes)
Local Descriptor Table (LDT)
LDT originally meant to be per task segment tables
LDTR points to current LDT
Segmentation Unit
Segmentation in Linux
| Segment | Base | G | Limit | S | Type | DPL | D/B | P |
|---|---|---|---|---|---|---|---|---|
| user code | 0x00000000 |
1 | 0xfffff |
1 | 10 | 3 | 1 | 1 |
| user data | 0x00000000 |
1 | 0xfffff |
1 | 2 | 3 | 1 | 1 |
| kernel code | 0x00000000 |
1 | 0xfffff |
1 | 10 | 0 | 1 | 1 |
| kernel data | 0x00000000 |
1 | 0xfffff |
1 | 2 | 0 | 1 | 1 |
The Linux GDT
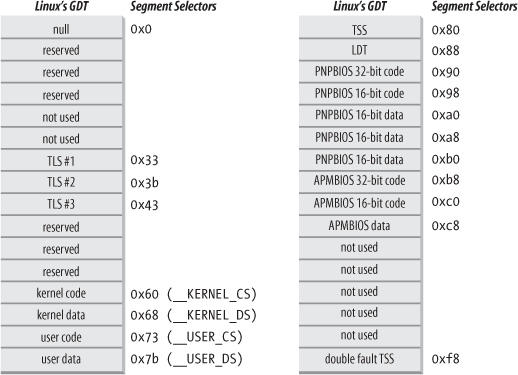

The Linux LDT
Mostly do not use.
Privilege Check for Data Access
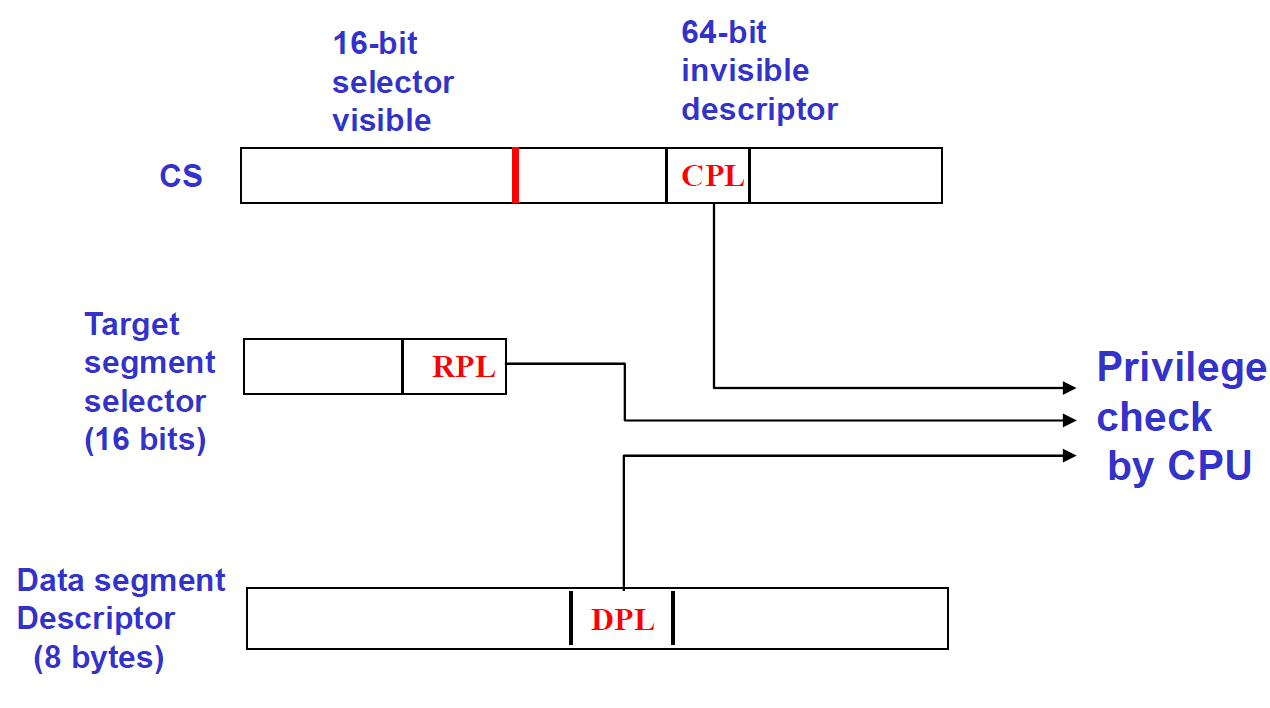
Code can read data iff max(CPL, RPL) < DPL.
Paging
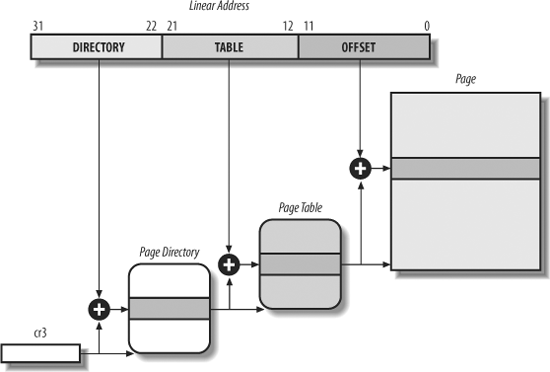
The page table is just another 4kB page, it holds 4096 / 4 = 1024 PTEs
{: .prompt-tip }
24 signals
Signals are the user level analogue of interrupts
Similarities
- asynchronous w.r.t . program execution
- not queued like a physical line; sending twice may cause
handler to execute once or twice - can be ignored, blocked, or caught
- but has some NMIs (
SIGKILL,SIGSTOP) - handler can be changed from default
- only data given to handler is signal # (traditional model)
- signal is (by default) blocked while handler executes.
Differences
- generated by software (kernel or a program via a system call)
- no “device” associated with signal; only software with permission
can send a signal (single permission allows any signal to be sent) - further differences with POSIX (Portable Operating System Interface)
model (as opposed to traditional model)- new real time signals are queued
- can be sent to threads or processes (to any thread in a process)
siginfostructure contains additional information about the signal
(e.g., address of exception)
| Signal Name | Default Action | Comment |
|---|---|---|
| SIGINT | Terminate | Interrupt from keyboard, Control-C |
| SIGABRT | Dump | Abnormal termination |
| SIGKILL | Terminate | Forced-process termination |
| SIGSEGV | Dump | Invalid memory reference |
| SIGPIPE | Terminate | Write to pipe with no readers |
| SIGALRM | Terminate | Real-timer clock |
| SIGTERM | Terminate | Process termination |
| SIGSTOP | Stop | Stop process execution, Ctrl-Z |
Signal Behavior
- Set to default by kernel
- Controlled by user program
- Stored in kernel (data struct
sigaction) - Used by kernel
struct sigaction {
void (*sa_handler)(int); // traditional
void (*sa_sigaction)(int, siginfo_t*, void*); // POSIX
sigset_t sa_mask; // signals to mask while executing
int sa_flags;
};Signal Behavior Control API
int sigaction (int signum, struct sigaction* newact, struct sigaction* oldact); read/replace signal behavior
int sigprocmask (int how, sigset_t* set, sigset_t* oldset); set bit vector of blocked signals
Kernel side Data Structures for Signals
k_sigaction a wrapper for sigaction.

Signal Generation
-
in user,
int kill (pid_t pid, int signal);
, 0 on success. -
in kernel,
int send_sig_info (int sig, struct siginfo* info, task_t* t);
, 0 on success.infocan be- an actual pointer
(void*)0for traditional signals sent from users(void*)1for traditional signals sent from within the kernel(void*)2for forced signals (ignore masking)
-
wrapper function for traditional signals
int send_sig (int sig, task_t* t, int priv); -
force signal (forcibly reset an ignored signal to default behavior, then call
then call send_sig_info, e.g. exception must override the block to avoid deadlock [instruction stuck]):
int force_sig_info (int sig, struct siginfo* info, task_t* t);
wrapper of it:
void force_sig (int sig, task_t* t);
Permission:
- kernel / Privileged / process with same user id can always send
- process with same login session can send
SIGCONT.
generated genreated (not ignored), added to pending signals.
Signal Delivery
check sigpending (in task structure) when returning from
- any interrupt
- any exception
- any system call
current sigaction for the signal shows:
- default: signal handled by kernel directly
- or executed program-defined handlers:
- adding a new stack frame to the user stack
- transferring machine state context to the user stack
- returning to the user mode


25 Linux abstraction on device drivers
Device Drivers
Kernel interacts with I/O devices.
Advantages: device code encapsulated in a module; hide the details on device dynamic load/unload of device drivers;
- graphics do not use drivers (r/w to device for performance)
- others (network / disk …) use file descriptor abstraction.
Kernel Abstraction: Device Files
I/O devices are treated as device files. (Inode includes an identifier of the hardware device)
Devices identified by major and minor numbers: #type(hda, tty…) + #instant number
2 types of device:
block device
disks, CD ROM, DVD, …
- data in blocks of fixed size (can be addressed randomly)
- transfers are usually buffered (to) and cached (from) for performance
character device
keyboard, terminal, printers, …
- contiguous space (or spaces) of bytes
- some allow random access or only sequentially

A device driver statically compiled in the kernel (registered when kernel init) / as a module (registered when loaded)
register a device
int register_chrdev (unsigned int major, const char* name, struct file_operations* fops);
major: to request a specific major #, Or 0 if a dynamically assigned major #.
int unregister_chrdev (unsigned int major, const char* name);
in open function,
inode->i_rdevstores major and minor #.inode->i_fopfield points todef_blk_fopsordef_chr_fops.
Operations concerns file operations, file structure, and inode.
26 Example: I-mail: instant messaging within the Linux kernel
- read:
Imail_read - write:
Imail_write - poll:
Imail_poll - ioctl:
Imail_ioctl - release:
Imail_release - fsync:
Imail_fsync
and kernel module defines module_init(Imail_init), module_exit(Imail_exit)
Design I-mail: f_op’s / date structure / locks
| operations | comment |
|---|---|
| read message (read) | get data from first message in user’s list; block until message arrives if necessary |
| write message (write) | write data into message being written |
| wait for message (poll) | check status of message list (empty/not empty); block until message arrives if necessary |
| end session (release) | send the message being written; remove file association from user data |
| send message (fsync) | send the message being written |
authenticate (associate file with user data) / set password (change authentication data) / start write message / delete message / add new user / delete user …
data structure
head of the user list: user admin.

for user list, use a reader/writer semaphore.


lock order
- user list r/w semaphore
- user data semaphore
| operations | lock |
|---|---|
| read | user data sem |
| write | user data sem |
| poll | user data sem |
| release | user data sem (Delivery: read user list r/w sem. & recipient’s user data sem.) |
| fsync | user data sem |
| authenticate | read user list, user data sem |
| set password | write user list, no user data sem |
| write(send) message | sender’s user data sem. |
| delete message | user data sem. |
| add new user | no user data sem. |
| delete user | write user list, user data sem, synchronize with all ops |
27 I-mail Design
is task cannot progress, put itself to sleep (task puts itself into queue and tells scheduler to run
something else). Race conditions: task checking sleep condition and putting itself to sleep.
wait queues: wait_queue_head_t: doubly linked list. Use marco to wake up: int wait_event_interruptible (wait_queue_head_t* wq, <C expression> condition); return 0 on true condition, others when recieved a signal.
Process:
- add to wait queue & make task Interruptable (can get signal)
- check condition? ture -> return
- no signal pending -> call
schedule (); // sleep
wake up: void wake_up (wait_queue_head_t* wq); / void wake_up_all (wait_queue_head_t* wq); / void wake_up_interruptible(wait_queue_head_t* wq); / void wake_up_interruptible_all(wait_queue_head_t* wq);
Imail block at: read/write/poll
Imail reader/poller wake at: new message delivered / user is deleted.
Imail Sleep
- release all locks
- check conditions without locks (! condition must be atomically safe)
- go to sleep
- when awoken: reacquire locks / recheck all validity requirements for waking.
Imail_read():
- check permission; begin loop
- acquire lock
down() - message found -> break (with lock)
- release lock
up() - check I/O flag of this file, error -> break
wait_event_interruptible(conditions to wakeup) get<0 means a signal, break; otherwise means condition is true, continue the loop (to check message).- loop is ended here. do write and release semaphore (
up()).
QA: Why not finish state check before acquiring lock:prevent race in which user deletion occurs
between check and use.
Why check in the loop:locks must be released to sleep, thus user may be deleted
between loop iterations (as desired admin should not have to
wait for user program to run!)
Why dereference OK? User data cant be freed during it.
Dynamic Allocation
no spin lock, use so GFP_KERNEL.
Message allocated by write; allocated by add user
When freeing, user data can be in use. Solution: remove but not free, free them on release call, set active_file to NULL if user is authorized. (lock prevents a user to just after check)
Sub function Synchronization
List lock
28 Review
Task Structure

Each process stores: PID, Parent Process, … Kernel stack : 8kb.
task_structdoubly linked list, Quick access by PID hash.- context switch: switch user to kernel; switch
task_struct; switch to the new statck - start a new program:
fork: copy (!Copy on write);exec: replace current program. - Different kinds of jobs: Interactive, Batch, real-time;
Scheduling
- Goals: Fair; Efficient; Responsive;
- Implementation: time slice; priority
Each processor have a runqueue, 2 double buffered priority arrays (avtive & expired) in it.
Priority Array Structure: Real Time tasks from 0-99, Standard tasks 100-139; each priority have 1 list & 1 bitmap.
Scheduler Policies
- FIFO: First In, First Out (in the same priority); 2 flavors: when new task arrive, switch to it / not?
- Round Robin: (in the same priority) even time slices assignment.
- Normal: task priority rescheduled, and use RR in each .
20 Memory Allocation
- a few small items → kmalloc
- a lot of items, repeatedly → slab allocator
- a big, physically contiguous region → free pages allocator
- a big area of virtual memory → vmalloc (not necessarily physically contiguous)
kmalloc flags
-
GFP_ATOMIC: do not wait for pages -
GFP_KERNEL,GFP_USER, … : wait -
void* kmalloc (size_t size, gfp_t flags);: uses exponentially sized slab caches from 8B; each allocation is contiguous in physical memory -
creste private slab cache:
kmem_cache* kmem_cache_create: return a page handle.
allocate pages
unsigned long get_zeroed_page (gfp_t flags);
unsigned long get_free_page (gfp_t flags);
unsigned long get_free_pages (gfp_t flags, unsigned int order);
void free_page (unsigned long);
void free_pages (unsigned long, int order); // order: log2(#pages)External fragmentation: fragmentations. / Internal fragmentation: request allocated
The Buddy System
partially busy bitmap (Partially busy bit (1 bit per pair): exactly 1 of 2 in use).
Allocation
- try the correct size free list
- if empty, try the next larger size and break up a chunk
- if free, split it up recursively, check (& flip) buddy bit.

Slab
-
Allow allocation of small blocks of memory to help
eliminate internal fragmentation that would be otherwise
caused by the buddy system. (one cache per object type!) -
Have caches of commonly used objects kept in an
initialised state available for use by the kernel. -
allocate: check in cache first
-
free: no destruction, simply return to init state.
-
kmalloc: When kmalloc is called, it uses one of the dedicated slab
caches to fulfill the request.
systemcall

Memory Maps


starting and ending virtual addr / permissions / #pages / inode / file
C libs are shared. heaps / stack / executable are not shared.
Copy-on-write
TLB
translation lookaside buffers (TLBs)
- keep translations of first 20 bits around and reuse them
- only walk tables when necessary
- x86 provides separate TLBs for 4kB & 4MB translations
- global page: TLB not flushed when changing to new program.

TSS
esp / esp0 (ring 0); when switching to kernel: use esp0