Value Prediction with Function Approximation
- tabular representation vs. function approximation
- function approximation can handle infinite state space (can’t enumerate through all states).
- linear function approximation
- design features ϕ(s)∈Rd (“featurizing states”), and approximate Vπ(s)≈θ⊤ϕ(s)+b , where θ should be fixed among features (in the following parts, b is ignored because it can be reached by appending a 1 to the feature vector).
tabular value function can be interpreted as feature vector ∈RS :
[0,⋯,0,1,0,⋯,0] where the position of the 1 indicates the state.
{: .prompt-info }
Example: Tetris Game
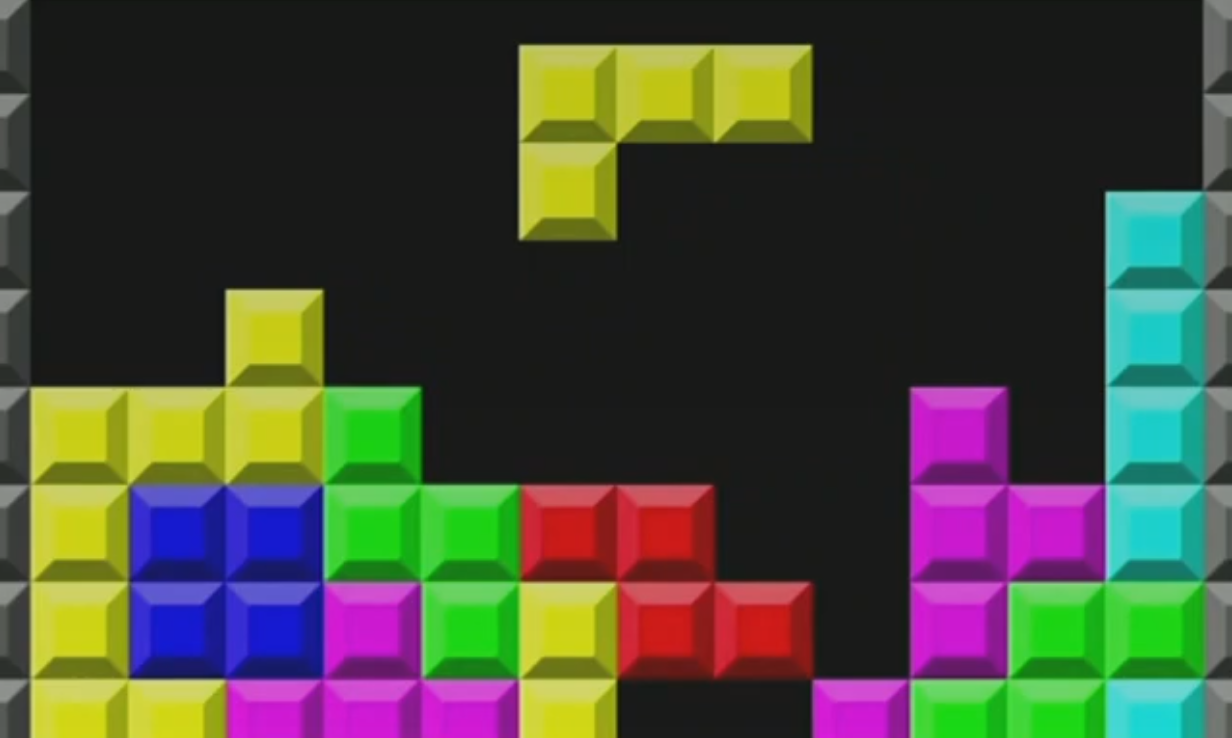
The state space is exponentially large: each block be occupied / not occupied.
Featurize: # of blocks on each column. In the example, the feature is (4454333⋯)
Monte-Carlo Vaule Prediction
Vπ(s)=E[G∣s]=f:S→RargminE[(f(s)−G)2]
Is a regression problem.
Why the expectation is the argmin? See here
{: .prompt-tip }
The same idea applies to non-linear value function approximation
More generally & abstractly, think of function approximation as
searching over a restricted function space, which is a set whose
members are functions that map states to real values.
E.g. a function space of linear value function approximation:
F={Vθ:θ∈Rd}, where Vθ(s)=θ⊤ϕ(s)
- typically only a small subset of all possible functions
- Using “all possible functions” = tabular!
- Equivalently, tabular MC value prediction can be recovered by choosing ϕ as the identity features \phi(\mathrm{s})=\left\\{\mathbb{I} \left[\mathrm{~s}=\mathrm{s}^{\prime}\right]\right\\}_{\mathrm{s}^{\prime} \in \mathrm{S}}
Find the function:
Vθ∈Fminn1i=1∑n(Vθ(si)−Gi)2
SGD: uniformly sample i and
θ←θ−α⋅(Vθ(si)−Gi)⋅∇Vθ(si)
Interprete Td(0) with Linear Approximation
TD(0) iteration is equivalent to
θ←θ+α(Gt−ϕ(st)⊤θ)ϕ(st).
Here θ is the tabular value function and ϕ is [0,⋯,0,1,0,⋯,0] , as mentioned here.
TD(0) with Linear Approximation
In TD(0), we do
V(st)←V(st)+α(rt+γV(st+1)−V(st)),
which, with all steps on t , gets
Vk+1←TπVk.
i.e.
Vk+1(s)=Eπ[r+γVk(s′)∣s]
Similar to Linear Approximation, rewriting expectation with a regression problem,
Vk+1(s)=f:s→RargminEπ[(f(s)−(r+γVs))2]≈Vθ∈Fargminn1i=1∑n(Vθ(si)−ri−γVk(s′))2.
And the SGD steps should be
θ←θ+α(Vθ(st)−rt−γVk(st+1))∇Vθ(st)